Mesh offsetting enables the precise expansion or contraction of a 3D mesh surface, crucial for applications requiring exact wall thickness and custom surface control, like 3D print...
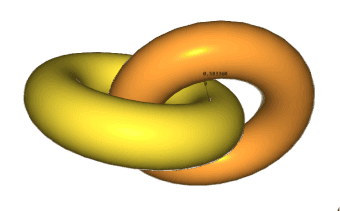
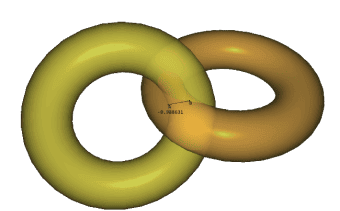
3D boolean operations are essential for creating complex shapes and forms that would be difficult or time-consuming to model from scratch using traditional modeling techniques.
Mesh healing is a critical process to prepare mesh for further use in the 3D pipeline, ensuring that mesh models are watertight, error-free, and suitable for applications such as s...
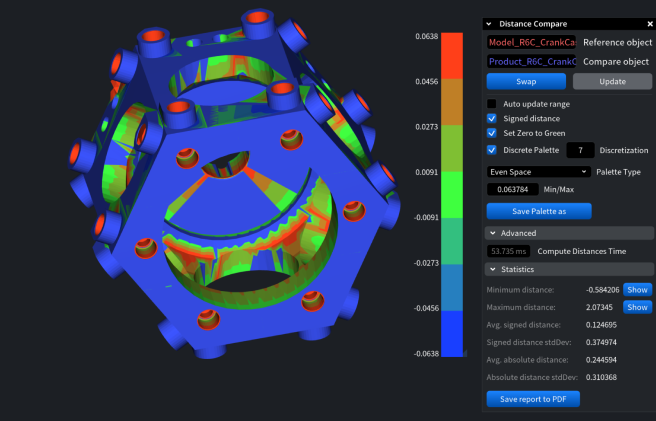
Finds minimal signed/unsigned distance between two meshes in realtime.
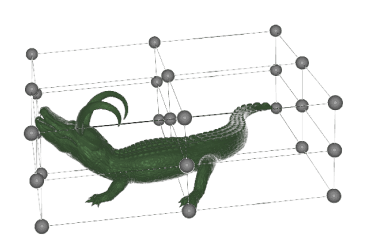
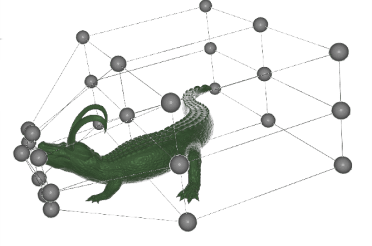
Free form deformation
Applies free form transformation to mesh or finds best free form transformation to fit given points.
Grey points – reference grid of free form transform (resolution is customizable)
Before
After
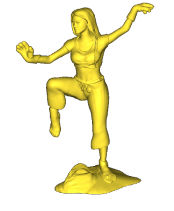
Laplacian deformation
It modifies a surface region following the movement of some fixed points in this region, and preserving curvature in other points
Read area – deformed area (a few points were fixed on forehead)
Before
After
Fill/Stitch Hole(s)
Triangulates a hole in mesh, or stitch two holes with a tunnel.
Different metrics could be used for triangulation.
Before
After
Before
After
Mesh Decimation
Decimation or simplification is reached by reducing the number of triangles, while preserving the overall initial shape and most prominent features.
The task is to find the shortest path between two points along the surface. The implementation is very fast and robust allowing its application in real-time editing:
Iterative Closest Points
ICP is for finding the best aligning transformation (from some transformation group, e.g. the group of all rigid transformations) for two meshes.
Before
After
Before
After
Tunnels fixing
MeshLib can detect and fix tunnels on surface. Here on the left a thin tunnel is detected, a cut is made, each side of which is filled with a disc-like patch to get a topological sphere on the right:
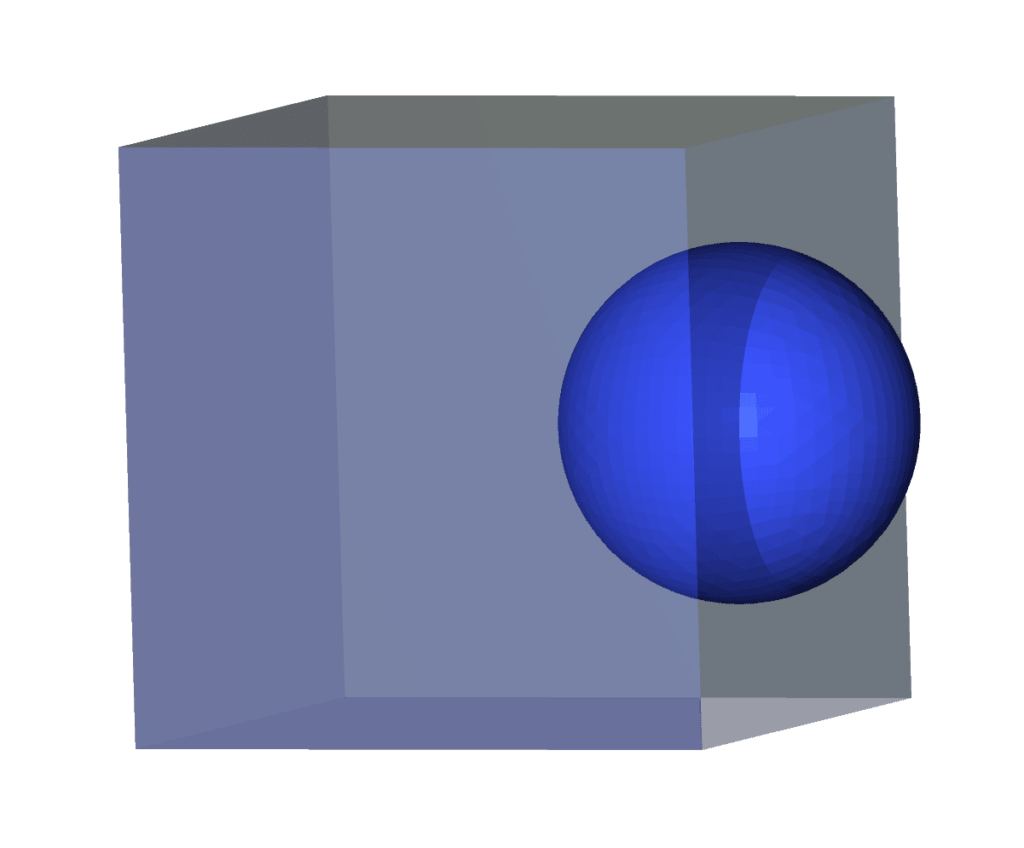
Voxel-based, that first converts closed meshes in 3D raster image (voxels), then makes the operations, and then converts it back. Any self-intersections are supported in input meshes, and are automatically fixed in output.
Direct mesh-based operations , which can work even with not-closed meshes and supports various input degeneracies. The main advantage over voxel-based mode is higher performance and extreme precision not limited by the size of one voxel.
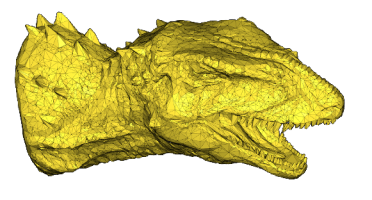
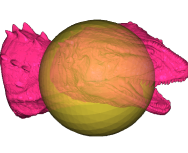
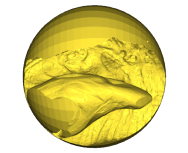
Sphere and Dino
Sphere – Dino (transparent)
Sphere – Dino form other side
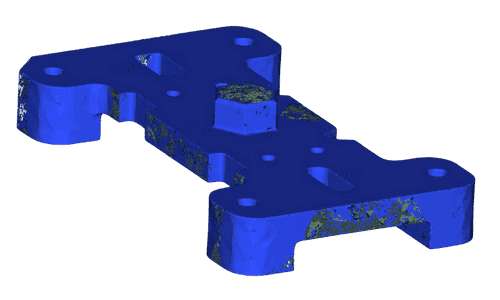
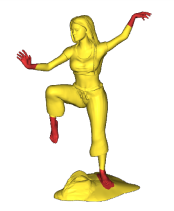
Partial Offset
Offset selected part of mesh only and produce single component mesh as result.
Red faces are selected
Mesh with offset of selected parts
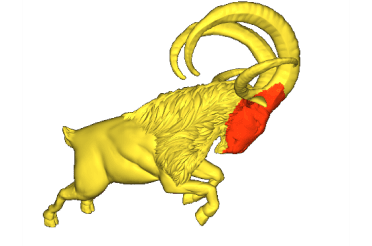
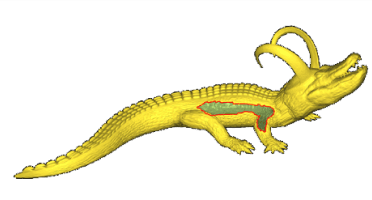
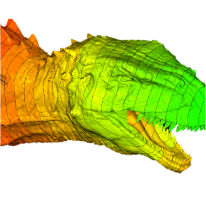
Segmentation by curvature
The task is to select a mesh region, separated from other mesh parts by a high curvature boundary (or some other metrics, including custom ones), given 2-3 points on the boundary.
The picture demonstrates segmentation of crests.
Each one is segmented by two points picked on its base
Compare with Precision
Effortlessly compare two models side by side, meticulously examining the surface distances. This innovative feature allows you to inspect the quality of your printed 3D model against the original CAD design. Identify even the slightest deviations and ensure your project meets the most stringent standards.
Distance map algorithms
Distance Map from mesh
Depth map from some plane to mesh. Could be visualized
in grey-scale image:– Black pixels of distance map – farthest– White pixels – closest
Before
After
Distance Map from contours
It presents field of distances in contours plane from each pixel, to contours closest point.Can be signed or unsigned. Zero value corresponds to input contour points
Input contour
Signed distance map. Inner points have negative value white – the most “inner” point
Unsigned distance map. Inner points have positive value white – the most “inner” point
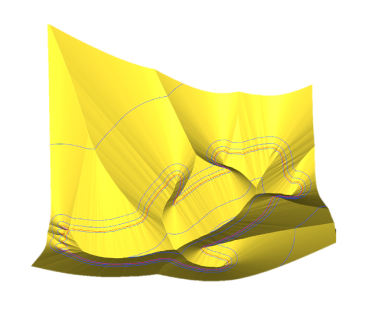
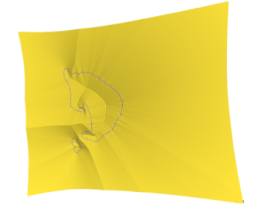
Distance Map iso-lines
Finds iso-line contour on distance map of any kind.
Mesh – distance map visualization Red line – input contour Blue lines – iso-lines
Distance Map merge
Merge min, max or subtraction of distance maps
Distance map A
Distance map B
Merge Maximum (intersection)
Merge Minimum (union)
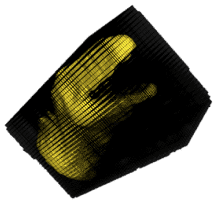
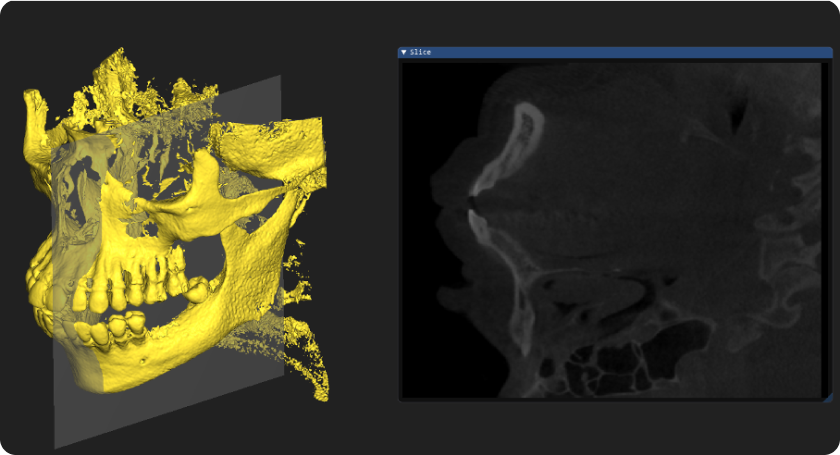
Voxel-based algorithms
Voxels
Voxel object presents 3D grid in space (visualized via Iso surface).
The Picture demonstrates dense voxels and its slice.
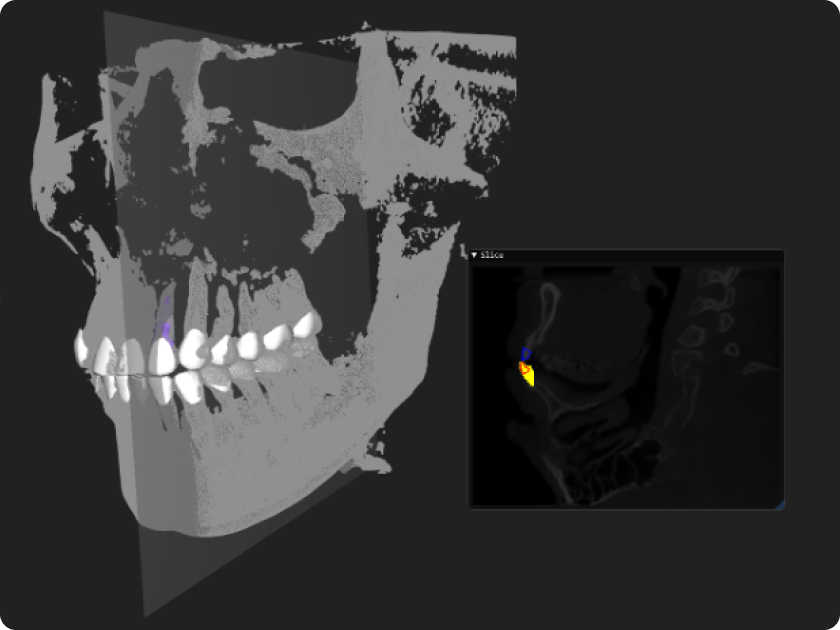
Semi-automatic segmentation
The picture demonstrates separation of tooth from the skull voxels.
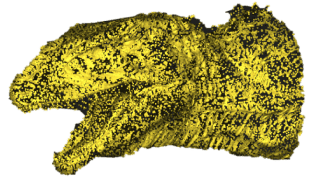
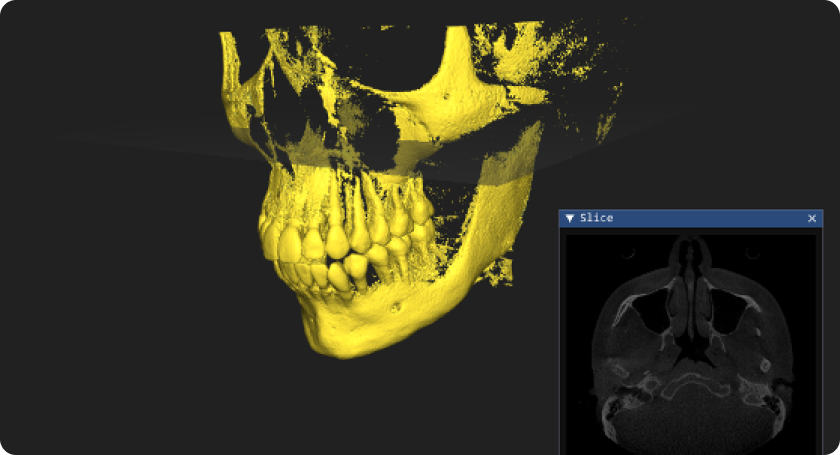
CT-Reconstruction algorithm
CT-Reconstruction algorithm implementation allows you to obtain dense volumes (voxel data) from a number of radiograph images.
Voxel data generated by CT-Reconstruction
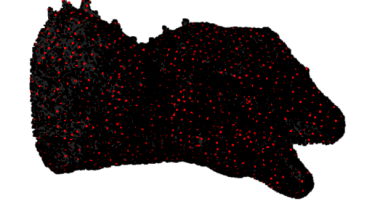
Point cloud algorithms
Points Sampling
Sampling – algorithm for taking representative subset of points. Uniform and grid sampling are implemented.
All points
Sampled points
Points Triangulation
Creating mesh from point cloud
Other features
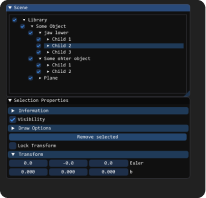
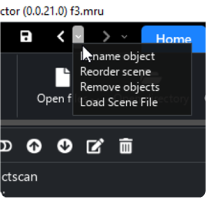
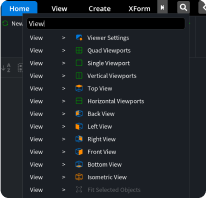
3D Viewer: Hierarchical object model for scene description